
张 仲 张 伟 刘宏伟 张 昭 高艳艳(沈阳工业大学;京津冀再制造产业技术研究院)
摘 要:工业机器人退役浪潮逐步临近,废弃物循环利用成为行业可持续发展的关键课题。当前,工业机器人循环利用面临适用场景受限、安全性难保障、回收体系不完善等问题,亟须通过技术创新与体系构建破解困境。工业机器人循环利用主要涵盖再制造、资源化利用两大路径,其中再制造通过拆解、检测、修复、组装等流程实现部件复用,资源化利用则借助物理、化学、生物等技术提取材料价值。人工智能与自动化技术的融入正推动智能化回收成为未来趋势。构建完善的工业机器人循环利用体系,不仅能挖掘退役装备的残值潜力,更能助力制造业转型升级与绿色发展,为制造强国建设提供有力支撑。
关键词:工业机器人;循环利用;再制造;资源化利用;智能化回收
作为全球最大的工业机器人生产国与消费国,我国连续多年稳居全球市场领先地位。随着产业规模持续扩张与技术迭代加速,工业机器人正逐步迈入退役周期,其较高的残值与广阔的循环利用空间,成为制造业绿色转型的重要突破口。
在制造强国战略引领与制造业转型升级的时代要求下,构建完善的新装备循环利用体系,既是破解退役装备处置难题的现实需要,也是提升高端装备产业全球竞争力的必经之路。当前,新一代信息技术与机器人技术深度融合,各行业智能化需求持续攀升,工业机器人产业迎来升级发展的关键窗口。在此背景下,探索工业机器人循环利用路径,不仅能挖掘退役装备的资源价值,更能为制造业绿色低碳转型注入持久动力,为制造强国建设筑牢资源循环根基。
一、工业机器人产业发展规模
依据《机器人 词汇》(GB/T 12643-2025),机器人被分为工业机器人、服务机器人和医疗机器人三个大类。工业机器人是指以自动控制系统和人工智能技术为核心,完成工业生产操作的机器人设备。工业机器人通常被设计用来执行重复性高、强度大、精度要求高的工作,以减轻人力劳动、提高生产效率,通常被应用于制造业领域。工业机器人按照应用功能来划分,主要分为以下6类:搬运机器人,用于物料的搬运、装卸等工作;焊接机器人,专门用于各类焊接作业;装配机器人,负责零部件的装配工作;喷涂机器人,进行表面的喷漆、涂覆等作业;加工机器人,进行切削、冲压、磨削等加工工艺;以及其他类型从事特种功能作业的机器人(见图1)。
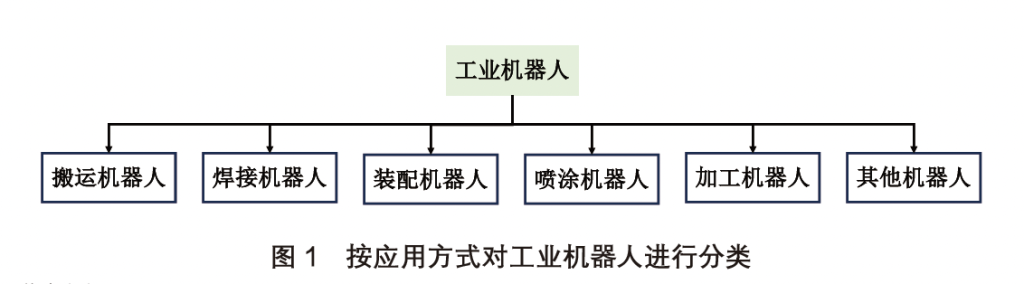
资料来源:作者自制。
工业机器人的基本构成主要包括主体、驱动系统、控制系统和感知系统。其中,主体由基座和执行机构组成,包括大臂、小臂、腕部和手部,这些部件共同构成了一个多自由度的机械系统。部分机器人还配有行走机构。工业机器人通常具有6个或更多的自由度,而腕部一般有1~3个活动自由度。驱动系统包含动力装置和传动装置,用于驱动执行机构完成相应动作。控制系统则根据输入的程序向驱动系统和执行机构发出指令信号,并进行控制(见图2)。
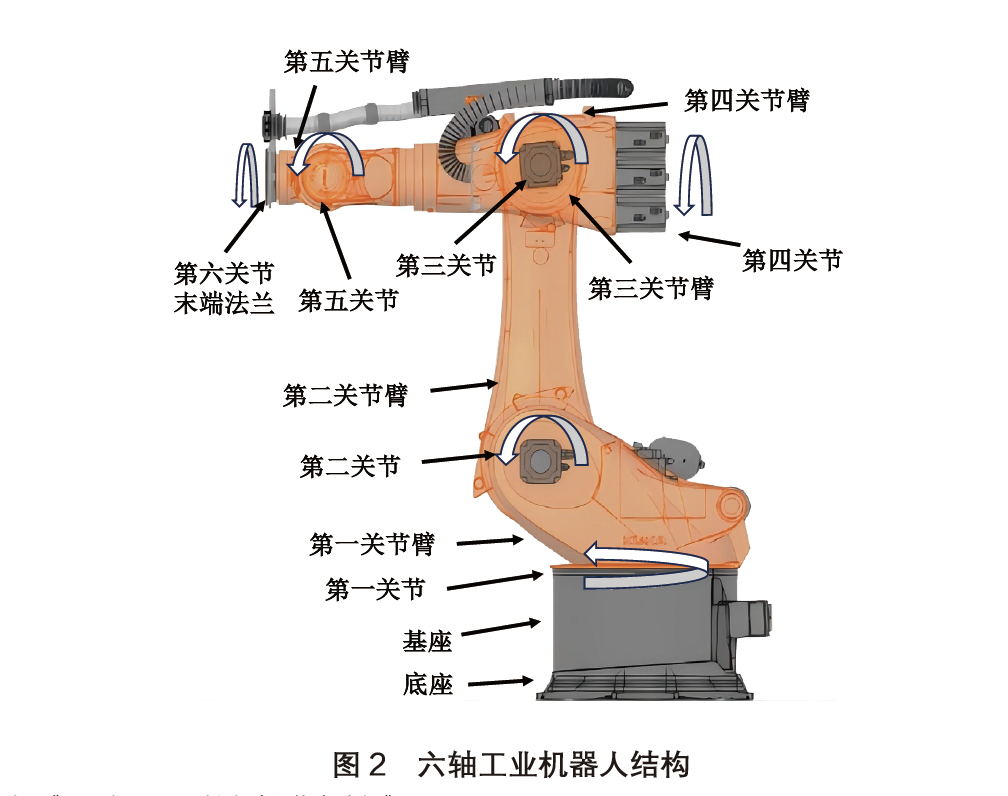
资料来源:凌天白,《工业机器人再制造过程能力分析》。
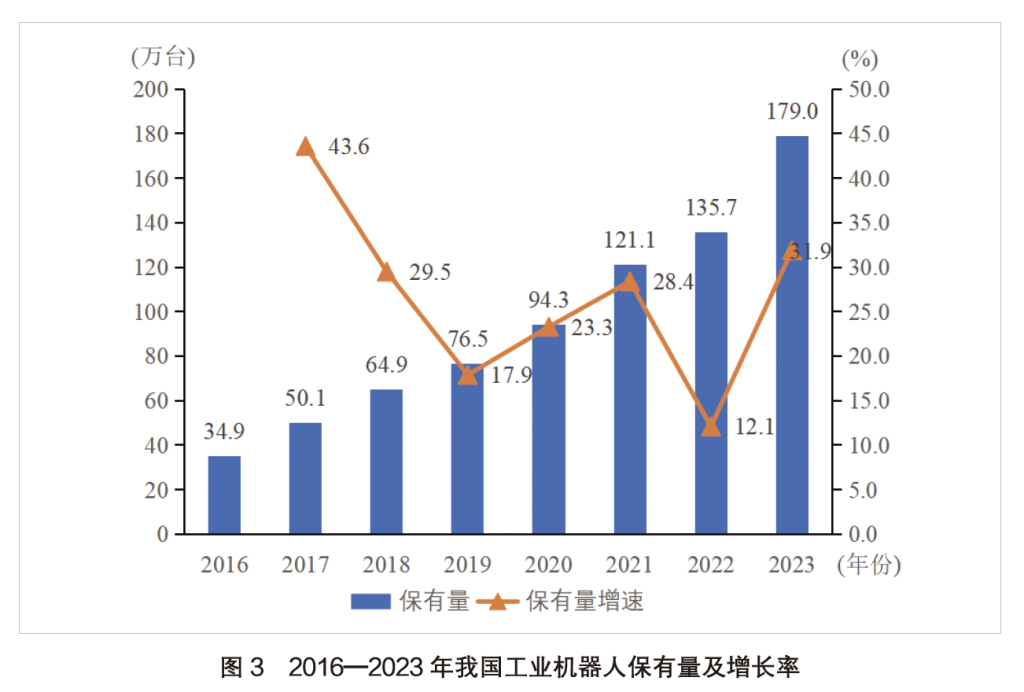
随着工业化和信息化深度融合,人力成本持续上升,工业机器人的优势日益显现,呈现出良好的发展趋势。2013—2024年,我国连续12年蝉联全球工业机器人消费国首位。我国工业机器人年产量居世界第一。2016—2023年,我国工业机器人产量逐年上升,但2018—2019年增速较之前有所下降,近两年随着新能源汽车的快速发展,我国工业机器人产量增速再次“抬头”。截至2022年,我国工业机器人占据了全球45%的市场份额,市场规模达到609亿元人民币,标志着我国在全球工业自动化领域占据了重要地位。根据国内相关机构统计数据,2023年,我国工业机器人产量为37.7万台,相比2022年降低14.9%;工业机器人进口量为8.2万台。2023年,我国工业机器人的保有量达到179.0万台(见图3)。
从工业机器人密度看,2019年全球工业机器人密度为113台/万人,新加坡和韩国是全球工业机器人密度最高的国家,每万名制造业员工中运行的工业机器人数量分别达到918台和855台,而我国工业机器人密度为187台/万人,落后于发达国家。2023年,全球制造业中的工业机器人密度为162台/万人;韩国是全球工业机器人密度最高的国家,每万名员工中配有1012台机器人;新加坡排名第二,每万名员工中配有770台机器人;中国的工业机器人密度为470台/万人(见图4),排名第三位。我国《“十四五”机器人产业发展规划》提出,到2025年,我国制造业机器人密度要较2020年(246台/万人)实现翻番,意味着届时机器人密度要达到500台/万人左右,工业机器人产业未来增长潜力巨大。
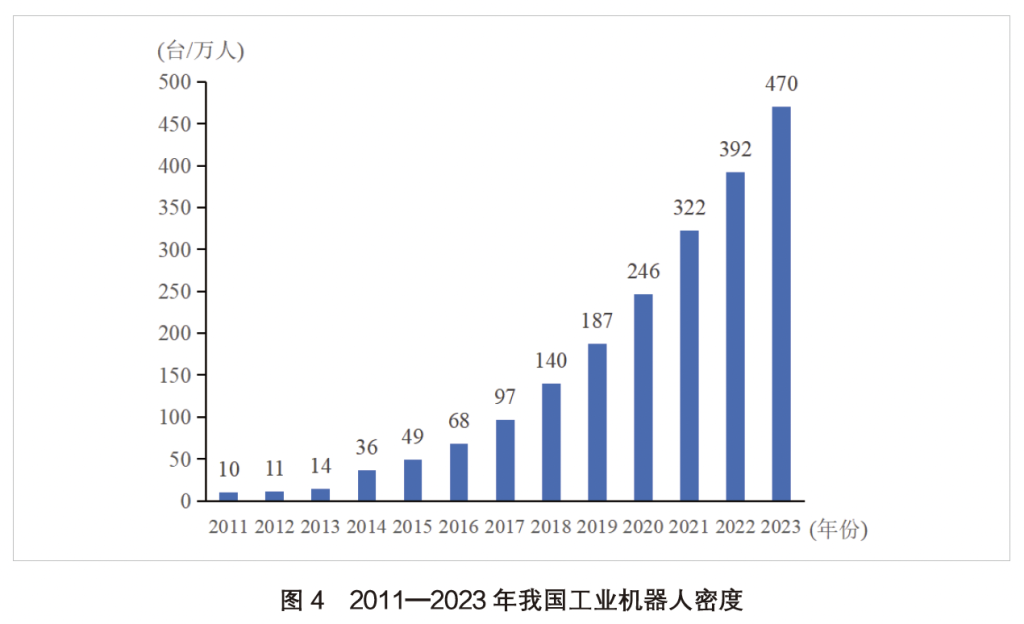
资料来源:作者自制。
二、工业机器人废弃物现状与预测
(一)工业机器人废弃物现状
工业机器人的工作寿命一般为8~10年,不同场景下的工业机器人因其作业环境、作业强度等不同,使用寿命也不同,如减速器使用寿命通常只有两年左右。因此,维修保养工业机器人需要大量用于替换的减速器,最早期的工业机器人正在进入退役阶段。根据工业机器人保有量数据推算,截至2023年,有19.5万台工业机器人因达到工作寿命而进入报废阶段。退役工业机器人循环利用主要存在以下问题。
一是工业机器人循环利用的适用场景受限。大部分工业机器人是根据特定行业或工艺流程定制化生产的,以用于相应的特定行业,技术门槛高,导致在循环利用时难以适应新的生产需求,需要进行重新编程或改造,要耗费大量的时间等资源。
二是工业机器人的安全性和可靠性难以保证。工业机器人长期服役会导致控制系统老化、机械磨损、系统响应缓慢等安全性问题。随着使用时间的延长,工业机器人零部件也可能出现磨损和老化,进而导致机器人的精度和可靠性下降,影响生产效率。
三是回收渠道不畅和循环利用体系不完善。我国大规模普及工业机器人的时间不长,尚未进入工业机器人大规模退役期,缺乏专业从事工业机器人回收的机构,导致大量废旧工业机器人被闲置或废弃。由于工业机器人形态各异、功能各异,我国尚未建立工业机器人拆解、检测、修复、再制造、资源化等循环利用体系,缺乏第三方认证机构,这些因素制约了工业机器人循环利用。
(二)工业机器人组成及废弃物产生量预测
我国信息化和工业化的深度融合,加快了制造企业生产设备智能化升级的步伐,工业机器人保有量持续增长。工业机器人的类型较多,受设备质量、使用环境、工作负载、维护情况等因素影响,一般来说,搬运机器人的使用寿命为20年,焊接机器人的使用寿命为5~10年。从目前来看,国产的工业机器人比进口的使用寿命相对短一些。综合按照10年的使用寿命来预测,到2025年,工业机器人累计退役规模将超过30万台。
三、工业机器人循环利用技术
工业机器人有较高的回收利用价值,主要有两种回收利用方式。一是对工业机器人进行二手利用,通过交易流通到要求较低的厂家进行再利用;二是对回收工业机器人关键零部件进行再制造,然后进行销售利用。我国工业机器人循环利用产业正处于发展初期,主要通过修复损伤、更换或清洗配件的方式延长工业机器人的使用寿命,资源化利用占有一定比例。我国正在积极探索智能化回收技术。
(一)工业机器人再制造
工业机器人再制造流程是一个系统性的工程,工艺流程涉及拆解、清洗、检测、评估、修复、组装等多个环节(见图5)。
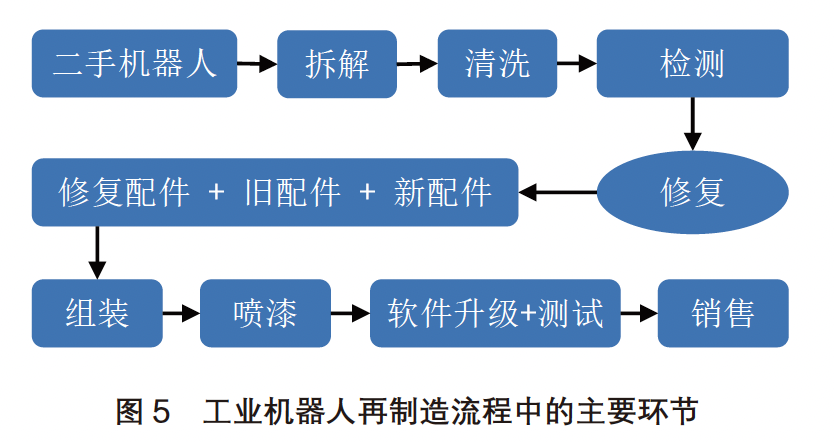
资料来源:作者自制。
具体流程包括以下五个步骤。
1.拆解与清洗
根据工业机器人的性能和状态,采用机械拆解设备对工业机器人进行初步拆解,分离出主要部件和组件,对于精密部件和复杂结构,需要人工辅助以确保拆解的准确性和完整性。拆解下来的部件会被彻底清洗,以去除油渍、污垢和其他杂质。清洗后根据部件的类型、材质和状况进行分类,以便后续的再利用或再制造。
2.检测与评估
对拆解下来的部件进行全面的检测和评估,识别出可以再利用或再制造的零部件。常用的检测技术包括无损检测技术和性能测试技术。其中,无损检测技术是利用超声波、X射线等无损检测手段,对拆解后的部件进行内部结构和缺陷检测,评估其再利用的潜力和价值;性能测试技术是通过对部件进行力学性能测试、电气性能测试等,以确定其性能和状态是否满足再利用要求。
3.再利用与再制造
状况良好的部件会直接进入再利用环节,用于组装新的工业机器人或作为备件在维修时替换损坏部件。对于有损伤且可修复的部件,采用再制造技术(如激光熔覆、电刷镀、喷涂等)进行修复,使这些部件恢复到原始部件的性能标准,再安装到工业机器人中使用(见图6)。
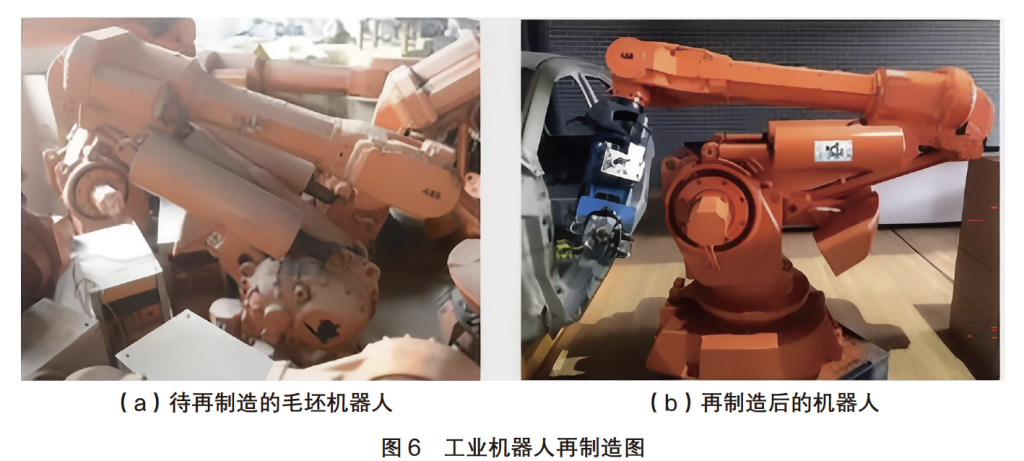
资料来源:哈工智能,《【51Renew】机器人再制造,提供制造业生产自动化新模式》。
4.质量控制与测试
无论是再利用还是再制造的部件,都需要进行严格的质量控制和测试。根据工业机器人的功能和使用场景要求,使用专业的仪器对其进行性能测试、耐久性测试、安全测试等,以确保这些部件在新的工业机器人中能够正常工作并满足预期的性能要求。
5.组装与调试
经过处理后合格的零部件会被组装成新的工业机器人。在组装过程中,需要确保各个部件之间的配合和连接准确无误。组装完成后,进行整体的调试和测试,以确保工业机器人的各项功能正常运行。
(二)工业机器人资源化利用
工业机器人的资源化利用是指对工业机器人部件进行再利用,主要通过物理、化学和生物回收技术进行资源化利用。
1.物理回收技术
物理回收技术需要先将工业机器人部件进行破碎与分选,再进行资源化回收。先从被拆解的工业机器人中分离出主要部件和组件,再对部件进行破碎处理,将其转化为较小的碎片或颗粒。通过分选技术,如筛分、磁选、风选等,对破碎后的混合物中不同性质的材料进行分离。例如,利用磁性分选器回收铁磁性材料(如钢铁部件),利用气流分选器回收不同密度和形状的材料。
在工业机器人的构成材料中,价值较高的是金属材料,包括钢铁、铝合金等。将破碎后产生的金属碎片送入熔炉中加热至熔化状态,去除杂质后将其浇铸成新的金属锭或型材,通过熔炼的方式进行回收。
2.化学回收技术
化学回收技术主要用于回收某些难以通过物理法直接回收的材料,如特殊金属或复合材料等。采用溶解与萃取技术回收某些含有特殊金属或有机化合物的部件,如电路板、塑料件等,先通过化学溶解和萃取的方法回收有用成分;再选择合适的溶剂和反应条件,将部件中的有用成分溶解出来;最后通过萃取、蒸馏等步骤进行分离和提纯。对于一些难以通过物理或化学方法直接回收的部件,如复合材料、高分子材料等,可在高温条件下,将这些材料分解成气体、液体和固体残渣,通过收集和处理这些产物,可以回收其中的有用成分。
3.生物回收技术
生物回收技术在工业机器人材料回收中的应用相对较少,但某些可降解材料(如生物基塑料)可以通过微生物的代谢活动进行降解和回收。生物回收技术适用于含有大量有机成分的部件,利用微生物的代谢活动将废弃部件中的有机物质转化为生物肥料或其他有用物质。这种方法具有环保、低能耗等优点,但目前在工业机器人材料回收中的应用范围有限。
(三)智能化回收技术
由于工业机器人循环利用对设备的精细化、智能化水平要求高,在回收、分选、再制造等方面开发智能化设备是未来的发展方向。
1.人工智能与机器视觉
利用机器视觉、人工智能等技术构建智能分拣系统,可自动识别不同部件和材料的特征。根据识别结果对工业机器人中的不同材料和部件进行分类,再扫描部件的形状、颜色、纹理等特征信息,将其与预设的数据库进行比对匹配,实现快速准确的分拣。在回收过程中,机器视觉系统还可以对部件进行缺陷检测,如检测裂纹、磨损、变形等,通过与预设的合格标准进行比对,自动剔除不合格部件,确保回收材料的质量。
2.人工智能与数据分析
智能决策系统是指利用人工智能和机器学习算法,对回收部件进行分析和预测,为回收决策提供科学依据,并根据回收部件的性能、市场需求等情况,自动选择最优的回收处理方案。这包括利用机器学习算法预测不同部件的回收价值和市场需求,指导制定回收策略;利用优化算法规划拆解分拣的路径和顺序,减少时间和人力成本;通过数据分析技术挖掘数据背后的规律和趋势,为回收过程提供科学依据和改进建议。
3.自动化与集成化
提高工业机器人循环利用的机械化水平是促进产业发展的重要内容,建设工业机器人循环利用自动化流水线、构建集成化解决方案是实现全流程智能化的关键举措。智能化回收系统中通常包括自动化流水线,以实现拆解、破碎、分拣、打包等环节的自动化操作。通过机器人和自动化设备协同工作,来提高回收效率和准确性。集成化解决方案利用智能化回收技术,并结合物联网、云计算等技术进行系统集成,实现对回收过程的远程监控、智能调度和数据分析等功能。
参考文献
[1]凌天白.工业机器人再制造过程能力分析[J].精密制造与自动化,2021,(02):30-33+58.
[2]艾小妹. 2023年中国工业机器人行业研究报告[EB/OL].(2024-02-19)[2025-12-20].https://mp.weixin.qq.com/s/t6uVnpMJ-6nv78giGApZoQ.
[3]哈工智能.【51Renew】机器人再制造,提供制造业生产自动化新模式[EB/OL].(2019-07-19)[2025-12-20].https://mp.weixin.qq.com/s/NZrUTOHg71GLNXwq4G26JQ.
【本文摘自《新兴产业废弃物循环利用发展报告(2025)》一书,有改动,已经作者授权刊发】
(张仲系沈阳工业大学机械工程学院在读博士研究生;张伟系京津冀再制造产业技术研究院院长,教授;刘宏伟系京津冀再制造产业技术研究院研发部部长,研究员;张昭、高艳艳系京津冀再制造产业技术研究院研发部工程师)